Lines, Planes and MATLAB
Nancy K. Stanton
based on original versions © 2000-2005 by Paul Green and Jonathan Rosenberg, modified with permission
Contents
In this published M-file, we will use MATLAB to solve problems about lines and planes in three-dimensional space. The mathematical content corresponds to section 13.5 of the text by Stewart.
We begin with the problem of finding the equation of a plane through three points.
Example 1
Find an equation for the plane through the points (1,-1,3), (2,3,4), and (-5,6,7).
We begin by creating MATLAB arrays that represent the three points:
P1 = [1,-1,3]; P2 = [2,3,4]; P3 = [-5,6,7];
If you wish to see MATLAB's response to these commands, you should delete the semicolons. Next, we create the normal vector to our plane by taking the cross-product of two vectors parallel to the plane.
normal = cross(P1-P2, P1-P3)
normal =
9 -10 31
Next, we declare x, y, and z to be symbolic variables, create a vector whose components represent the vector from P1 to a typical point on the plane, and compute the dot product of this vector with our normal.
syms x y z P = [x,y,z] planefunction = dot(normal, P-P1)
P = [ x, y, z] planefunction = 9*x - 10*y + 31*z - 112
The equation of our plane is now planefunction = 0. We remark that the MATLAB's symbolic dot product assumes that the its arguments may be complex and takes the complex conjugates of the components of its first argument. To see the effect of this, we compute instead:
dot(P-P1, normal)
ans = 9*conj(x) - 10*conj(y) + 31*conj(z) - 112
Since in this course we only want dot products of real-valued vectors, it helps instead to define
realdot = @(u, v) u*transpose(v);
to avoid this annoyance.
realdot(P-P1,normal)
ans = 9*x - 10*y + 31*z - 112
Example 2
Now we use the equation of the plane in Example 1 to find the point of intersection of the plane with the line through (1,2,-1) and (3,3,3).
P4 = [1,2,-1]; P5 = [3,3,3];
We parametrize the line:
syms t
line = P4 + t*(P5-P4)
line = [ 2*t + 1, t + 2, 4*t - 1]
line now gives the coordinates of a typical point on our line in terms of the parameter t. We can now evaluate planefunction at such a point by substituting line for P.
newfunction = subs(planefunction, P, line)
newfunction = 132*t - 154
Now we solve newfunction = 0 for t, and substitute the result in line to obtain our desired point, and check our answer.
t0 = solve(newfunction) point = subs(line, t, t0) subs(planefunction, P, point)
t0 = 7/6 point = [ 10/3, 19/6, 11/3] ans = 0
Notice that the command solve(newfunction) automatically sets the function to zero, recognizes the independent variable, and solves for it.
Example 3
Now we use the plotting capabilities of MATLAB to plot the plane and the line. First we solve for z in terms of x and y in the equation of the plane.
zplane = solve(planefunction, z)
zplane = (10*y)/31 - (9*x)/31 + 112/31
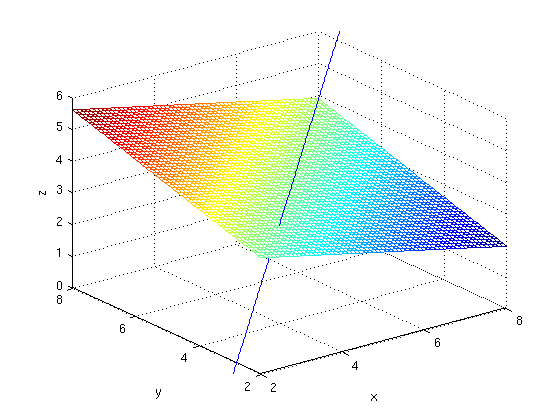
We plot the plane and the parametrized line on the same set of axes. We will use the command hold on to put both plots on the same diagram.
ezplot3(line(1), line(2), line(3), [-1,3]), hold on ezmesh(zplane, [2, 8, 2, 8]), hold off axis([2, 8, 2, 8, 0, 6]), title ''
When we use ezmesh and ezplot3, it's necessary to plot the line first and then the plane. The reason is that the code for ezplot3 is written in such a way as to undo the effect of any previously issued hold on command. Of course one can get around this by using plot3 instead of ezplot3, like this:
ezmesh(zplane, [2, 8, 2, 8]), hold on tt = -1:3; linex = subs(line(1), t, tt); liney = subs(line(2), t, tt); linez = subs(line(3), t, tt); plot3(linex, liney, linez), hold off axis([2, 8, 2, 8, 0, 6]), title ''
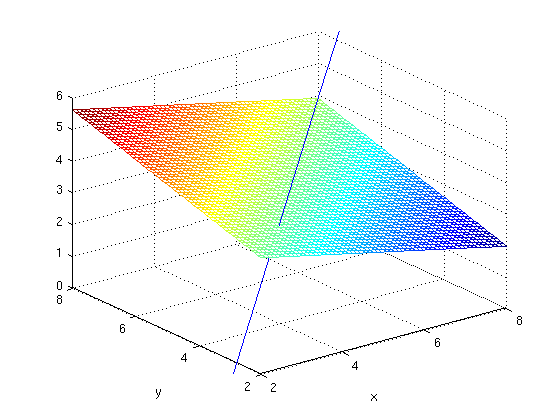
But obviously this is more awkward.
Example 4
Now we look for an equation for the cylinder of radius 3 around our line. The cylinder is the set of all points whose distance from the line is 3. (The distance from the point P to a line is the distance from P to the closest point on the line.) Equivalently the cylinder is the set of all points the square of whose distance from the line is 9. P already represents a generic point with coordinates (x,y,z) and line represents a point on the line. Thus the square of the distance from a point in space to a point on the line is given by
distsq = realdot(P-line, P-line)
distsq = (t - y + 2)^2 + (z - 4*t + 1)^2 + (2*t - x + 1)^2
With x,y and z fixed, this gives us a function of t, the square of the distance from P to the point on the line with parameter t. We need to find the square of the distance from P to the closest point, then set that equal to 9. So we need to minimize distsq as a function of t, and set the resulting minimum equal to 9. (We could work with the distance, which is sqrt(distsq), but when we differentiate, the formulas will be simpler if we work with the square of the distance.)
distsqprime = diff(distsq, t) tcrit = solve(distsqprime, t) distsqfunc = subs(distsq, t, tcrit)
distsqprime = 42*t - 4*x - 2*y - 8*z tcrit = (2*x)/21 + y/21 + (4*z)/21 distsqfunc = ((8*x)/21 + (4*y)/21 - (5*z)/21 - 1)^2 + ((2*x)/21 - (20*y)/21 + (4*z)/21 + 2)^2 + ((2*y)/21 - (17*x)/21 + (8*z)/21 + 1)^2
This is complicated because subs has not expanded the squares. We can use the command expand to expand them.
cylinder = expand(distsqfunc) - 9
cylinder = (17*x^2)/21 - (4*x*y)/21 - (16*x*z)/21 - 2*x + (20*y^2)/21 - (8*y*z)/21 - 4*y + (5*z^2)/21 + 2*z - 3
Setting the last output to 0 gives us a function for the cylinder.
Problem 1
In this problem you will find the distance from point P4 to the plane of Example 1 three different ways:
(a) By using the formula

where n is a normal to the plane and b is the vector from P1 to P4 (see Example 8 in section 13.5 of Stewart).
(b) By finding the foot of the perpendicular from P4 to the plane as follows:
- Parametrize the line through P4 normal to the plane.
- Find the point common to the line you have just parametrized and the plane, as in Example 2.
- Find the distance between the point you have just found and P4.
Verify that methods (a) and (b) give the same answer.
(c) By parametrizing the plane and minimizing the square of the distance from a typical point on the plane to P4. Parametrize the plane in the form P1+s(P2-P1)+t(P3-P1). As in Example 4, find and name the square of the distance from P4 to a typical point on the plane. Still as in Example 4, but retaining s as a parameter, minimize the square of the distance with respect to t. The result should still contain the parameter s. Then minimize the result with respect to s. Finally, take the square root to get the distance.
Problem 2
Find the equation of the plane in Example 1 in another way, by assuming that the equation has the form ax + by + cz = 1 (this is always possible if the plane doesn't go through the origin), and solving for a, b and c so as to make the plane pass through P1, P2, and P3. Check that your answer agrees with the one we found above.