Robonaut2 is the product of a NASA and General
Motors robotics
partnership.
In addition to the mathematical work described in my research publications, I earn my keep, so to speak, by bringing innovative methods to bear on GM's products and processes. Since 2015, my focus has been on modeling and real-time control algorithms for batteries in electric and hybrid-electric vehicles. These algorithms help get the maximum performance (range, power, efficiency) from lithium-ion batteries while also managing the battery's usage for long life.
Battery work is a significant departure from my previous endeavors, which aimed to develop and deploy applications of robotics and related technologies in GM's manufacturing facilities. An important thrust was the use of programmable tooling in the production of automotive bodies, allowing flexible production of multiple body styles on the same equipment and faster introduction of new models. A top concern was making this equipment accurate, so that our vehicles are of the highest quality, which effort was connected to my research in robot calibration.
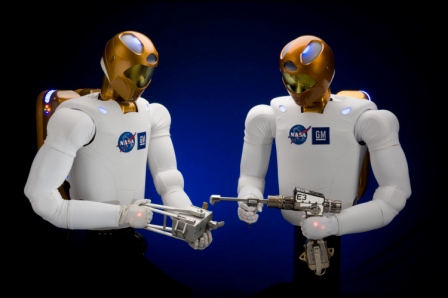
I was a member of the GM/NASA team that developed Robonaut2, a.k.a. R2, a humanoid robotic torso. With two 7-DOF (degrees of freedom) arms and highly dexterous hands, it has the capacity to closely mimic human motion. Replete with over 350 motion and force sensors, the robot is an outstanding platform for work in autonomous dexterous manipulation and human interaction. While NASA intends to send a robonaut into space to work alongside of astronauts or as part of a precursor mission to prepare a site for a manned mission, GM has hopes of someday using Robonaut derivatives in manufacturing. Spin-off technologies may find their way into our products, such as in vehicle safety systems.
|
|
|
Robonaut2 is the product of a NASA and General |

|
|
Robonaut2 is designed to work safely with humans. |
Check out some early Robonaut2 videos here.
Read "A Giant Leap for Humanoid Kind" about Robonaut2 at M.I.T.'s Technology Review (February 2010).On April 14, 2010, we announced that Robonaut 2 was to be transported to the International Space Station on the last flight of space shuttle Discovery (STS-133 mission). After a scrubbed launch in November 2010, R2 headed for ISS on February 24, 2011 and was subsequently installed in the station's Destiny laboratory.
After a full check-out of R2's motion capabilities in a zero-g environment, the first humanoid-to-human handshake in space took place on February 15, 2012. Expediton 30 Commander Dan Burbank reported, "For the record, it was a firm handshake."

|
|
First humanoid-to-human handshake in space. |

|
| R2 and friend on earth. |
For more details, visit NASA's Robonaut website.