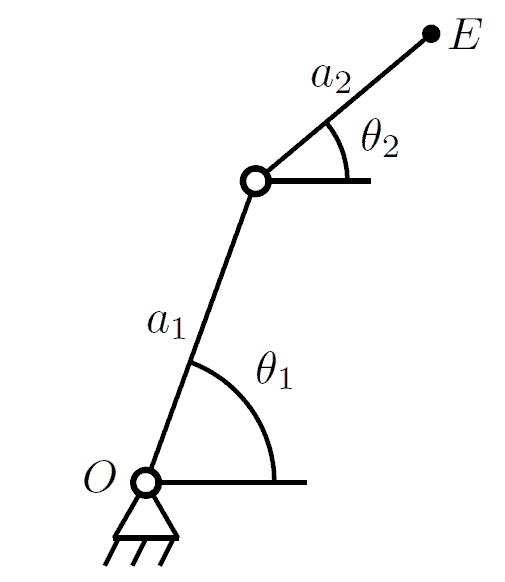
A rigid mechanism
Jonathan D. Hauenstein and
Viktor Levandovskyy.
Return to the main page.
In Section 5.1, we consider the following polynomial and polynomial-exponential systems related to the inverse kinematics
of the RR dyad:
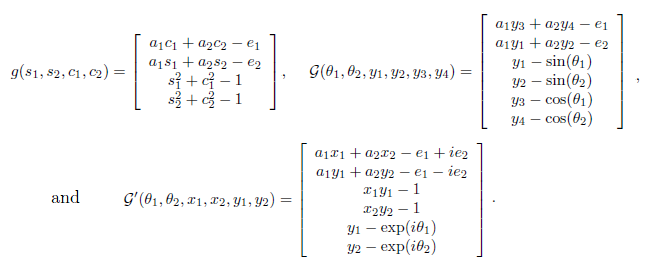
where
a1 = 3, a2 = 2, e1 = 1, and e2 = 3.5.
The points, respectively, under consideration are


and

Directions for certifying X
Before you begin, you will need to have a working binary of alphaCertified on your machine.
- Save the files polySysg and X in the same directory and copy the binary of alphaCertified into this directory.
- Execute the command
> ./alphaCertified polySysg X
from this directory.
- Here is the output displayed to the screen. From this output, we see that both
X1 and X2 are approximate solutions of g = 0 with real distinct associated solutions.
- The file summary provides certified upper bounds, to four digits, of 0.0736 and 0.0788 for
&alpha(g,X1) and &alpha(g,X2), respectively.
Directions for certifying Z
Before you begin, you will need to have a working binary of alphaCertified on your machine.
- Save the files polyExpG, Z, configCertify96,
configCertify1024, configNewton and newtonRes.sh
in the same directory and copy the binary of alphaCertified into this directory.
- Execute the command
> ./alphaCertified polyExpG Z configCertify96
from this directory.
- Here is the output displayed to the screen. From this output, we see that, using
96-bit precision, both Z1 and Z2 are approximate solutions of G = 0 with real distinct associated solutions.
- The file summary provides soft certified upper bounds, to four digits, of 0.1265 and 0.1355 for
&alpha(G,Z1) and &alpha(G,Z2), respectively.
- Execute the command
> ./alphaCertified polyExpG Z configCertify1024
from this directory.
- Here is the output displayed to the screen. From this output, we see that, using
1024-bit precision, both Z1 and Z2 are approximate solutions of G = 0 with real distinct associated solutions.
- The file summary provides soft certified upper bounds, to four digits, of 0.1265 and 0.1355 for
&alpha(G,Z1) and &alpha(G,Z2), respectively.
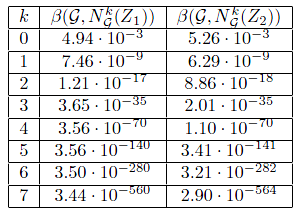
- Execute the shell script newtonRes.sh.
- The second number corresponding to each point in the file constantValues
created by this script provides the length of the Newton residuals presented in the following table.
Directions for certifying W
Before you begin, you will need to have a working binary of alphaCertified on your machine.
- Save the files polyExpGp, W, configCertify96, and
configCertify1024
in the same directory and copy the binary of alphaCertified into this directory.
- Execute the command
> ./alphaCertified polyExpGp W configCertify96
from this directory.
- Here is the output displayed to the screen. From this output, we see that, using
96-bit precision, both W1 and W2 are approximate solutions of G' = 0 with distinct associated solutions.
- The file summary provides soft certified upper bounds, to four digits, of 0.1492 and 0.1422 for
&alpha(G',W1) and &alpha(G',W2), respectively.
- Execute the command
> ./alphaCertified polyExpGp W configCertify1024
from this directory.
- Here is the output displayed to the screen. From this output, we see that, using
1024-bit precision, both W1 and W2 are approximate solutions of G' = 0 with distinct associated solutions.
- The file summary provides soft certified upper bounds, to four digits, of 0.1492 and 0.1422 for
&alpha(G',W1) and &alpha(G',W2), respectively.
Directions for solving g = 0
Before you begin, you will need to have a working binary of both Bertini
and alphaCertified on your machine.
- Save the file bertinig, polySysg, and configCertify96
in a directory and copy the binaries of Bertini and alphaCertified into this directory.
- Execute the command
> ./bertini bertinig
from this directory.
- Here is the screen output. From this output, we see that Bertini has heuristically computed
two real nonsingular isolated solutions of g = 0. The file nonsingular_solutions provides the two
approximations computed by Bertini.
- To certify the solutions using 96-bit precision, execute the command
> ./alphaCertified polySysg nonsingular_solutions configCertify96
from this directory.
- Here is the output displayed to the screen and summary. From this output, we see that, using
96-bit precision, both points computed by Bertini are approximate solutions of g = 0 with real distinct associated solutions.
Directions for computing solutions of f = 0 using fp.
Before you begin, you will need to have a working binary of both Bertini.
- Save the files bertinifp and bertinifpTof in a directory and copy the binary of Bertini into this directory.
- Execute the command
> ./bertini bertinifp
from this directory.
- Here is the screen output. From this output, we see that Bertini has heuristically computed
six nonsingular isolated solutions of fp = 0. The file nonsingular_solutions provides the six
approximations computed by Bertini.
- Execute the commands
> cp nonsingular_solutions start
> ./bertini bertinifpTof
from this directory.
- Here is the screen output displayed to the screen and the file
nonsingular_solutions.
In particular, Bertini computed six numerical approximations to solutions of f = 0.
Return to the main page.