Dynamic Data Driven Application Systems (DDDAS)
Investigating the Application of DDDAS to the Command & Control of UAV Swarms
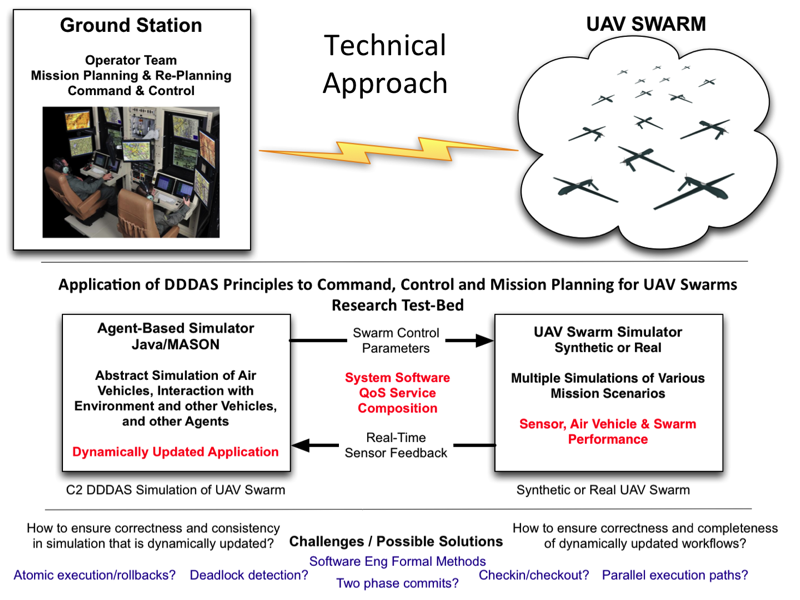
Objective
Use dynamically updated predictive simulations to determine when a swarm of autonomous systems may need control intervention to maintain operational status of the swarm.
Goals
Investigate and demonstrate the application of DDDAS principles to predictive simulations of arbitrary swarms of agents: UAVs, autonomous sensors systems, RPVs, etc. Determine how such dynamically updated simulations could predict that the performance a swarm of autonomous systems was degrading and could suggest minimal proactive control interventions to return the system to nominal performance.
Use dynamically updated predictive simulations to determine when a swarm of autonomous systems may need control intervention to maintain operational status of the swarm.
Goals
Investigate and demonstrate the application of DDDAS principles to predictive simulations of arbitrary swarms of agents: UAVs, autonomous sensors systems, RPVs, etc. Determine how such dynamically updated simulations could predict that the performance a swarm of autonomous systems was degrading and could suggest minimal proactive control interventions to return the system to nominal performance.
Related DDDAS Research
WIPER: The Integrated Wireless Phone Based Emergency Response System
WIPER: The Integrated Wireless Phone Based Emergency Response System