DDDAS Accomplishments
Multiple separate but related projects investigated the DDDAS paradigm applied to UAV swarms. Each project provided methods and examples of how the DDDAS concept could be used for the command and control of swarms of UAVs. As the numbers of UAVs in the military inventory increase operator shortage & overload is becoming a problem; groups or swarms of semi-autonomous UAVs will need to be controlled by the operators, requiring new modes of command & control. Operators will need to “fly the swarm” rather than a “UAV” as is largely done today.
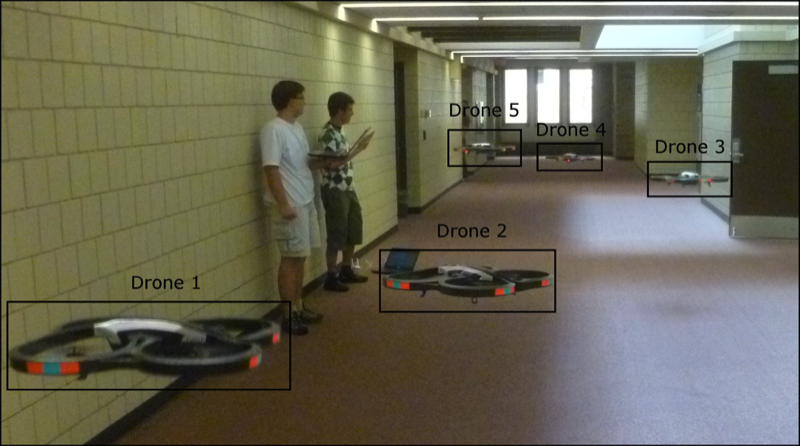
A DDDAS test-bed was developed utilizing web-services middleware to communicate between a “real-world” UAV swarms and agent-based simulations. Six Parrot AR.Drones 2.0 quadrocopters were demo’ed as a “real world” UAV swarm communicating over the test-bed to a ground-based command & control application. Experiments were run testing the effects of intra-swarm communication protocols on target discovery.
A second investigation examined dynamic mission scheduling for swarms by incorporating DDDAS into a global-local hybrid-planning scheme. A global agent utilized simulation to determine optimal task assignment, while agents locally determine the execution order for assigned tasks.
A third project explored DDDAS in the swarm engineering context. Building upon previous work in swarm robotics, a new agent behavior for swarm search was added to introduce optimal swarm formation assignment. An agent-based simulation was developed for incorporation into a DDDAS framework for dynamic formation assignment.
A fourth investigation applied the DDDAS paradigm to two swarm command and control scenarios. In both scenarios, UAV swarms were augmented with mission-specific sensors, providing real-time measurements to a ground operator. Based on real-time measurements, the operator could adjust a single, global swarm parameter to achieve mission objectives. Together, these four projects further the DDDAS paradigm by incorporating simulations into real-time command and control of UAV swarms.
A fifth ongoing investigation is quantifying swarm performance with agent-based modeling. The modeling is demonstrating the utility of an explanatory model in the DDDAS framework, and provided an interesting juxtaposition of a bottom-up model analyzed by a top-down clustering algorithm, where both calculated results based on the distance of agent neighbors.
A sixth ongoing investigation is extending the test-bed to incorporate enhanced UAV and remote control technology to test more realistic UAV swarms. This activity is funded in part by an AFSOR DURIP.
A DDDAS test-bed was developed utilizing web-services middleware to communicate between a “real-world” UAV swarms and agent-based simulations. Six Parrot AR.Drones 2.0 quadrocopters were demo’ed as a “real world” UAV swarm communicating over the test-bed to a ground-based command & control application. Experiments were run testing the effects of intra-swarm communication protocols on target discovery.
A second investigation examined dynamic mission scheduling for swarms by incorporating DDDAS into a global-local hybrid-planning scheme. A global agent utilized simulation to determine optimal task assignment, while agents locally determine the execution order for assigned tasks.
A third project explored DDDAS in the swarm engineering context. Building upon previous work in swarm robotics, a new agent behavior for swarm search was added to introduce optimal swarm formation assignment. An agent-based simulation was developed for incorporation into a DDDAS framework for dynamic formation assignment.
A fourth investigation applied the DDDAS paradigm to two swarm command and control scenarios. In both scenarios, UAV swarms were augmented with mission-specific sensors, providing real-time measurements to a ground operator. Based on real-time measurements, the operator could adjust a single, global swarm parameter to achieve mission objectives. Together, these four projects further the DDDAS paradigm by incorporating simulations into real-time command and control of UAV swarms.
A fifth ongoing investigation is quantifying swarm performance with agent-based modeling. The modeling is demonstrating the utility of an explanatory model in the DDDAS framework, and provided an interesting juxtaposition of a bottom-up model analyzed by a top-down clustering algorithm, where both calculated results based on the distance of agent neighbors.
A sixth ongoing investigation is extending the test-bed to incorporate enhanced UAV and remote control technology to test more realistic UAV swarms. This activity is funded in part by an AFSOR DURIP.